CTDR-0514ES-4LS
EtherCAT 4축 스테핑 드라이버
제품 개요

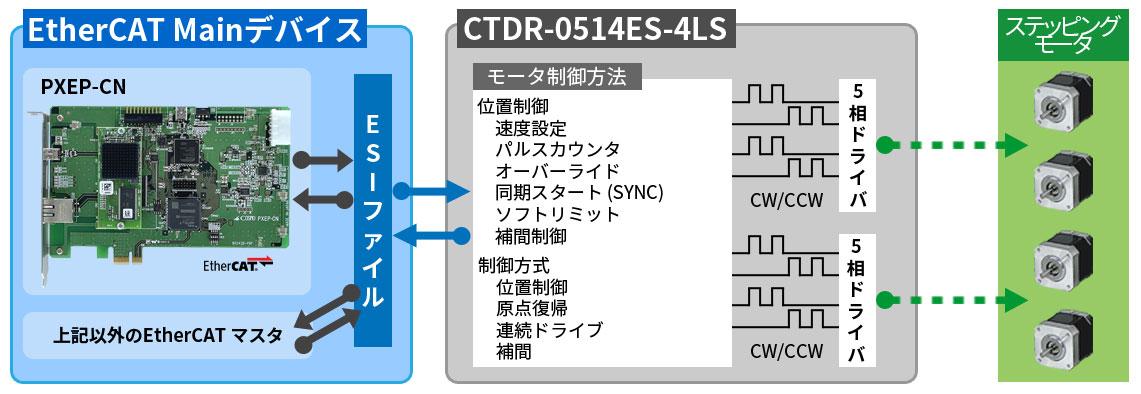
CTDR-0514ES-4LS는 이더넷 기반 필드버스 시스템인 EtherCAT에 대응하는 모션 컨트롤러 기능 내장형 4축 스테핑 드라이버입니다.
축당 3가지 구동 전류(0.35A / 0.75A / 1.4A)를 선택할 수 있으며, 최대 250분할 마이크로스텝을 지원합니다.
4축 동기 제어와 직선/원호 보간 기능이 내장되어 있으며, TwinCAT 개발에도 대응합니다.
주요 특징
EtherCAT 통신
EtherCAT 통신 대응으로 고속 실시간 제어가 가능합니다.
4축 독립 제어
4축 스테핑 모터를 독립적으로 제어할 수 있습니다.
3단계 전류 설정
축당 0.35A / 0.75A / 1.4A 중 선택 가능합니다.
마이크로스텝
최대 250분할까지 지원하는 16종류의 마이크로스텝 설정이 가능합니다.
모션 컨트롤러 내장
모션 컨트롤러 기능이 내장되어 있어 I/O 제어만으로 모터 제어가 가능합니다.
보간 기능
직선/원호/연속 보간 기능을 지원하여 복잡한 동작 패턴 구현이 가능합니다.
4축 동기 스타트
4축 동시 시작과 동기 제어로 정밀한 다축 제어가 가능합니다.
TwinCAT 대응
Beckhoff사의 TwinCAT 개발 환경을 지원합니다.
I/O 제어
| 특징 | 설명 |
|---|---|
| 간편한 I/O 제어 | EtherCAT 컨트롤러에서 간단한 I/O 제어만으로 모터 제어가 가능합니다. |
| 통합 구조 | EtherCAT 통신부, 모션 컨트롤, 스테핑 드라이버를 일체화한 제품입니다. |
| 소프트웨어 부담 경감 | 메인 디바이스 측에서 모터 제어를 할 필요가 없어 소프트웨어 부담을 줄일 수 있습니다. |
| 기본 모터 제어 | 가감속 제어, 동작 중 속도/이동량 변경 등 기본적인 모터 제어 기능을 설정할 수 있습니다. |
| 복잡한 제어 가능 | 4축 동기 스타트, 연속 보간 드라이브 등 응용을 통한 복잡한 제어도 가능합니다. |
| ESI 파일 제공 | EtherCAT 표준 ESI 파일을 제공하여 다양한 메인 디바이스 및 소프트웨어로 제어할 수 있습니다. |
모터 제어 사양
| 항목 | 사양 |
|---|---|
| 가감속 기능 | 직선 / S자 가감속 (비대칭 대응) |
| 오버라이드 | 속도 변경 / 이동량 변경 (동작 중) |
| 보간 기능 | 직선 보간 / 원호 보간 / 연속 보간 (상대/절대 좌표) |
| 동기 기능 |
FreeRun / SM2동기 / DC (SYNC0 이벤트 동기) ※ 모듈 내 4축 간의 DC 동기는 없습니다. |
| 시퀀스 기능 | 리미트 정지 / 소프트 리미트 정지 / 여자 오프 설정 / 알람 시 설정 |
| 감시 기능 |
드라이브 스테이터스 (드라이브 상태) / 엔드 스테이터스 (드라이브 종료 요인) 유니버설 시그널 (범용 입력) |
스테핑 드라이버 사양
| 항목 | 사양 |
|---|---|
| 축수 | 4축 |
| 여자 출력 |
5상 스테핑 모터 여자 출력 슬라이드 스위치로 0.35A/상, 0.75A/상, 1.4A/상 선택 가능 |
| 구동 방식 |
마이크로스텝 구동 방식 (로터리 스위치로 선택 가능) 1, 2, 4, 5, 8, 10, 20, 40, 80, 16, 25, 50, 100, 125, 200, 250분할 |
| 구동 전류 | 0.35A / 0.75A / 1.4A 전환식 |
| 자동 전류 감소 | 구동 신호 정지 후, 모터 전류를 자동으로 약 50%로 감소 |
| 최고 응답 주파수 | 500kpps (kHz) |
| 입력 신호 (외부 제어용: SENS) |
포토커플러 입력 13점 + 측 리미트 신호 (각 축 1점) - 측 리미트 신호 (각 축 1점) 원점 신호 (각 축 1점) / 비상 정지 (전축 공통 1점) |
| 입력 전류 / 전압 | 2~4mA / DC +24V±10% |
EtherCAT 통신 사양
| 항목 | 사양 |
|---|---|
| 통신 사양 | EtherCAT (Ethernet for Control Automation Technology) |
| 디바이스 프로파일 | CoE (CANopen over EtherCAT) |
| 제어 방식 | 위치 제어 / 원점 복귀 / 연속 드라이브 / 보간 |
| Cycle Time | 300μsec~ (마스터 사양에 따름) |
| 통신 오브젝트 |
SDO: SDO Request, SDO Response, Abort message PDO: 가변 PDO 대응 |
| 피지컬 레이어 | 100BASE-TX (IEEE802.3) / 100Mbps (전이중) |
| 접속 / 케이블 | 라인 / Ethernet 카테고리 5e 이상의 STP 케이블 |
정격
| 항목 | 사양 |
|---|---|
| 전원 전압 | DC +24V±10% |
| 소비 전류 |
드라이버 부: 최대 6A 제어 부: 최대 120mA |
| 사용 주위 온도/습도 | 0~45°C / 10~80%RH (결로 없을 것) |
| 외형 치수 |
76(W)×146(D)×112(H)mm (단, 돌출부는 제외) |
| 질량 | 750g |
부속품
| 항목 | 내용 |
|---|---|
| 하니스용 커넥터 |
전원 커넥터 / 콘택트 모터 커넥터 / 콘택트 I/O 커넥터 / 콘택트 |
대응 모터
| 모터 타입 | 사양 |
|---|---|
| 당사 취급 스테핑 모터 |
20mm각~42mm각 / 0.35A / 7종류 24mm각~60mm각 / 0.75A / 7종류 42mm각~60mm각 / 1.4A / 4종류 |
| 기타 스테핑 모터 |
5본 리드선 타입 1: 청, 2: 적, 3: 등, 4: 녹, 5: 흑 10본 리드선 타입 1: 청+흑, 2: 적+갈, 3: 등+자, 4: 녹+황, 5: 백+회 |
EtherCAT®는 독일 Beckhoff Automation GmbH에 의해 라이선스된 특허 취득 완료 기술이며 등록 상표입니다.